
论文:循环水养殖系统中水动力特性及其与鱼类相互影响研究进展
循环水养殖系统中水动力特性及其与鱼类相互影响研究进展
车宗龙,任效忠,张倩
(设施渔业教育部重点实验室(大连海洋大学),辽宁 大连 116023)
20世纪70年代,水产养殖业在世界范围内迅速兴起,在之后的水产业发展历程中,中国成为第一个也是唯一一个在养殖产量上超过捕捞量的国家[1]。在过去的几十年里,中国水产养殖业的发展速度超过全球人口的增速,并成为世界第一水产养殖大国[2]。2020年中国水产养殖产量为5 224.20 万t,占全年水产品总产量的79.77%[3]。随着水产养殖业的迅速发展,环境污染、水质恶化、水资源浪费、水产品品质下降等一系列问题日益突出。如传统的池塘养殖基础设施薄弱,导致水产品品质、产量逐步降低;而随着养殖密度的增加,养殖水体易富营养化,水质受污染严重,养殖尾水排放带来的环境问题增多[4]。为解决这些难题,维持绿色、健康的养殖环境,高效循环水养殖模式逐渐走向产业化并呈现快速发展势头。
工厂化循环水养殖通过去除养殖水体中的残饵与粪便等固体颗粒物及有害物质并经过多种水处理程序,以保持水质稳定及健康的养殖环境,符合科学环保及可持续发展理念;其综合现代生物技术及信息化科学、工程应用技术等于一体,为实现生态环保及水产品的高品质、高产量起到了重要作用[1,5]。与传统养殖生产方式相比,工厂化循环水养殖具有养殖环境可控、空间利用率高、水资源节约、养殖密度高、环境污染小、产品品质可控、供应安全稳定、养殖生产与投资风险低等优点[6],使其成为水产养殖业转型升级发展的重要方向之一。
目前,国内外学者和科研机构在循环水养殖模式构建中更多地集中在养殖鱼种的选育、水处理技术和养殖装备的攻关研究上,对于养殖池及其流态的研究相对较少。由于进水系统的能量是养殖池系统流场的驱动力,也关系到养殖池内残饵、粪便等废弃物的汇聚与排出,良好的水动力性能有利于污染物的排出,养殖池水动力直接影响生物的健康和福利。因此,养殖池水动力的研究至关重要。本文综述了循环水养殖池系统中水动力及其与鱼类相互影响的研究进展,旨在为进一步研究养殖池内流场特性,优化池内养殖动物的生存环境提供借鉴,为实现循环水养殖模式的优化发展提供科学参考。
1 循环水养殖系统水动力研究方法
为研究循环水养殖系统内流场现象及水动力的作用机理,采用适宜的研究方法与技术手段尤为重要。目前,循环水养殖系统内水动力的研究方法主要分为物理模型试验法和数值模拟法(表1)。
1.1 物理模型试验法
物理模型试验法是基于物理模型试验建立的试验系统,并利用流速测量仪器等跟踪记录流场分布的变化情况。流速分布是流体运动的主要特性之一,流速测量是养殖池水动力研究中的核心内容,因而测速技术的发展至关重要。目前,随着计算机、激光、超声、图像处理等先进技术的不断发展,流速测量技术实现了从单点到多点、从单向到多向、从稳态到瞬态的进步,并且已实现了水流瞬时全场测量[7]。同时,流速测量仪器也从毕托管、热线热膜风速仪、转子式流速仪、电磁流速仪等接触式测量发展到声学多普勒仪和粒子流速仪等非接触式测量,其中,声学多普勒仪包括声学多普勒电流剖面仪(Acoustic Doppler Current Profiler,ADCP)、超声多普勒仪(Acoustic Doppler Velocimetry,ADV)和激光多普勒测速仪(Laser Doppler Velocimetry,LDV),粒子流速仪包括粒子图像流速仪(Particle Image Velocimetry,PIV)和粒子追踪流速仪(Particle Tracking Velocimetry,PTV)[8]。
循环水养殖系统水动力研究中,以ADV、PIV应用较多并取得一定的研究成果。ADV是基于声学多普勒效应原理,由相干声学脉冲的频移或相移来计算3个接收探头方向的速度,进而转换为正交坐标系中的流速,主要用于记录相对高频率的单点瞬时速度分量[9]。ADV以操纵简单、精度高、无需率定、可用于三维速度测量等优点,已成为物理模型试验流场测量中使用广泛的测量手段。但ADV也存在一定的局限性,由于采样点与发射及接收探头存在一定的距离,因此,距离水面相对较近的位置无法获取测量数据,而仪器本身也同样存在缺陷,导致流速信号存在噪声部分,对数据的精确程度存在一定的影响。此外,ADV在清澈的水流中难以准确测量,需添加一定浓度的悬浮颗粒反射超声波信号以提高测量精度[10]。有学者采用ADV对曝气池内的流场特性进行了试验研究,分析了流场分布情况及紊动强度[11]。相比于ADV等传统的流速测量技术,PIV是一种非接触式瞬时全流场测量技术,其突破了单点测量的局限性,实现了全流场瞬态测量及无干扰测量[12-13]。PIV能更好地评估加入挡板后漩涡分离池内的流速分布,实现流动条件的改善[14]。也有学者同时采用PIV和ADV测量了与池式鱼道底部和侧壁平行的平面上多个位置的水流速度和湍动能(TKE),并分析了两种方法的差异,结果表明,两种方法监测的数据具有良好的吻合性[15]。
养殖池水动力是循环水养殖池系统固体颗粒物集排污的直接驱动力,对固体颗粒物的排出及分布有显著影响,通过分析固体颗粒物的聚集分布特征进而也能反映出池内流场分布特性。由高分辨率照相机、电脑、控制软件组成的图像采集系统被广泛应用于采集养殖池内污染物的聚集分布图像处理,并通过图像处理方法对采集到的图像进行图像预处理、图像增强、图像分割、二值化和轮廓提取等相关处理步骤,进而采用处理后的图像分析污染物的聚集分布特征[16-17],污染物的聚集分布特征也间接地反映出池内水动力特性。
1.2 数值模拟法
数值模拟法是根据工程及物理问题等运用计算机进行数学建模并进行模拟计算,达到解决实际问题的目的。应用计算流体力学(computational fluid dynamics,CFD)数值模拟分析循环水养殖系统内水动力特性,是优化与获得较好的结构参数及运行参数的有效手段之一。随着CFD的迅速发展,养殖池内水动力研究从单相流发展到多相流,并成为物理模型试验手段的有效补充与重要支撑。迄今为止,CFD已被广泛用于养殖池中的水动力特性研究。相关成果中多为利用CFD技术模拟分析养殖池结构对养殖池内流态分布的影响[18],近年来,关于固-液和固-液-气多相流的数值模型研究也逐步发展起来。Liu等[19]利用CFD建立循环水养殖系统八角形养殖池三维数值模型,通过模拟获得了养殖池内的流速分布及固体颗粒的去除效率,并将数值结果与一个完整的物理模型监测数据进行了对比,其结果具有一致性。汪翔等[20]利用CFD对养殖跑道、集污区进行固-液-气三相流稠密离散相模型模拟,研究了跑道式养殖系统内的流速分布及集污区固相颗粒的分布特征。
CFD的应用促进了养殖池水动力研究的发展,相比于物理模型试验法,CFD能更加全面地反映养殖池内的流场信息,具有建立模型系统便捷、易于调整系统参数、不占用场地、周期短、成本低等优点,极大地节省了人力、物力和财力[21]。但CFD技术也存在一定的不确定性,需要数值模型建立准确、网格划分适宜、边界条件设置合理等理论技术支撑以提高模拟的精确性,同时,数值模型的应用还需要物理模型试验数据和生产实测数据的验证作为支持。物理模型试验研究和数值模型模拟研究互为补充,二者结合可以更好更准确地开展养殖池系统水动力学研究,以明确流场分布规律及深层次的流体力学机理。
2 循环水养殖系统水动力特性
在循环水养殖系统中,养殖池是鱼类及其他养殖动物赖以生存的场所,而良好的水动力环境有利于创建优质的养殖环境以保证鱼类的健康和福利。通过调控养殖池内的流场,使其达到鱼类的偏好流速,从而构建适宜的鱼类养殖环境,这对鱼类生长、品质养成均起着至关重要的作用[24]。因此,研究养殖池内水动力特性对提供良好的养殖环境,提高养殖动物的品质,增加经济收益等方面均有重要意义。
养殖池结构是影响水体流动模式的主要因素,对其进行合理设计是满足鱼类最优流场速度、有效水体交换、均匀进料分配、良好水质及较低能量消耗的关键。养殖池结构的细微变化也会对养殖池内的水动力特性产生较大的影响[25],在当前应用大型养殖池以降低成本的发展趋势下,优化养殖池设计对于实现养殖池内的水体流动条件发挥着不可低估的作用[26-27]。养殖池参数包括养殖池的形状与尺寸、进水结构(进水位置、入射角度等)、排水结构、进水流速、出水流速、循环量等操作参数,还包括切向与径向速度分量、雷诺数、冲力等功能参数[28-30]。目前,在养殖池设计优化方面已取得了一定的研究进展,其中,养殖池的池型、进水结构、排水结构等是影响养殖池水动力的主要因素。
2.1 养殖池池型对流态的影响
池型结构是影响养殖池内水动力的最重要参数之一,常见有圆形、矩形、方形圆弧角、跑道式、八角形、圆锥形养殖池等。循环水养殖池的池型各异,各种池型优缺点同样明显。
圆形养殖池具有优良的流态,水体交换均匀、无死角,且近似于圆柱体易产生二次流,有利于固体废弃物汇聚到池底中央排水口并顺利排出,但其空间利用率低、养殖水体造价较高。矩形养殖池虽有较高的空间利用率,但并不具备活塞流、混合流两种理想流动模式,与圆形池相反,由于池角处存在死水区,水体的整体流态较差,不利于污物的聚集与排出。方形圆弧角养殖池即方形圆切角养殖池,其结合了圆形养殖池和矩形养殖池各自池型的优良特性,在养殖池内流态和空间利用率方面都具有相对较好的优势,具备良好的产业推广价值[31]。此外,跑道式养殖池、八角形养殖池除了自身优势外,也存在死水区、集排污效果不佳的困扰。
为实现养殖池内良好的流态及混合性,许多学者开展了养殖池池型结构方面的研究。研究发现,“矩形混合池养殖单元”通过将矩形养殖池改装成6个相邻反向旋转的混合单元,排水口位于每个单元的底部中心,切向射流于单元池内建立旋转循环,这些矩形单元池的混合流动特性与圆形池中监测到的流场形态相似[32]。此外,在相似结构的养殖池中也获得了类似的水体流动特性,并且在两个连续进水口之间设置挡板有助于在原有的基础上提高池内水体平均速度、速度均匀性和旋转养殖单元中的对称性[33-34]。因此,选择合适的池型是实现高效养殖的关键,通过选择理想池型,调整养殖池内可控参数,达到水动力条件的最优状态是实际生产过程中亟须解决的问题。
2.2 养殖池进水结构对流态的影响
养殖池进水结构主要分为单管和多管进水,水力驱动装置主要有射流管和射流混合喷射器等,其中,射流管是不同养殖池内应用较广的水力驱动装置,其动力来源于水泵驱动。射流混合喷射器应用较少,其动力来源于本身机械装置,在切向速度、均匀性、混合时间、集排污效率等方面展现出了比射流管更好的效果,同时,射流角度也是影响水动力条件的重要因素[29]。近年来,部分学者针对不同养殖池内进水结构对水动力特性的影响开展了一些研究。如本研究团队对方形圆弧角养殖池进水管布设位置进行了研究,结果表明,进水管布设于方形圆弧角养殖池的圆弧角位置是优选布设,有利于改善养殖池底部水动力特性[35]。进一步研究表明,单管设置在弧壁中间位置及双管设置在相对的两个弧壁中间位置是单管和双管两种进水结构的优选布设方式;两种进水方式下,进水管入射角度约 50°时池内水体平均流速最高;两种进水布设方式下,池内水体平均流速较高且随水体日循环次数的增加池内流场效果越佳[36]。
矩形养殖池内,在具有单一入水口的结构中,出现了较多的死水区(低流速区),排污效果较差;当采用多个进水管时,进水管之间的距离对养殖池内的速度均匀性有较大的影响;采用矩形养殖池长边中心的底部双向切向进水,此方式下养殖池内流速大小分布均匀,具有最高的平均速度,可防止固体废弃物沉积,有利于提升养殖池的自动清洁能力并达到改善养殖水质的效果[37]。多单元跑道式养殖池中,喷嘴直径对养殖池内的流速影响明显,对底部中心的排水率影响较小,并且喷嘴直径和底部中心的排水率均不影响径向流速分布的均匀性[38]。也有学者得出相似的结论,并且可以通过调节进水管入射角度改变圆形养殖池内的流速,随着底部流量的增加,养殖池中心附近的速度明显增加[30]。除此之外,在养殖池内增加径向流动可以有效地改善八角形养殖池内的流体混合和流动的均匀性,提高水动力性能[25]
综合来看,进水结构是实现循环水养殖不可或缺的一环,无论是射流管还是其他水力驱动装置,一旦找准合适的位置布设,就会成功实现养殖池内最优流速及自清洁能力。
2.3 养殖池排水结构对流态的影响
养殖池排水结构分为单通道排水和多通道排水,在单管入流和双管入流的条件下,以多通道排水方式构建的养殖池系统内的平均流速、均匀性均优于单通道排水养殖池系统[39]。
为了控制养殖池内的流量,满足流动旋转性和均匀性要求,实现养殖池中所需的流动模式,多通道排水系统目前被广泛应用。最典型的是Waterline和Cornell型两种双通道养殖池(图1),其分别在养殖池中心设置溢流管和在养殖池侧壁较高位置设置出水口。目前,Waterline型养殖池应用较多,底流分流比是影响双通道养殖池内流场特性的重要参数之一。研究表明,在底流分流比较小时,Waterline型养殖池池底自清洁能力、养殖池整体流场均匀性均优于Cornell型养殖池[16]。底流分流比对Waterline型养殖池流场特性影响较小。采用双通道排水能有效改善养殖池内水动力条件,增强水体混合[39]。此外,带有池壁排水的双通道系统可以较快地排出固体颗粒等污染物,同时降低水体循环流速,从而根据需要控制流态,此方面Cornell型双通道养殖池较为典型。有学者研究了Cornell型双通道养殖池中的水动力特性,其中,池内大部分固体颗粒物随着小流量的水体通过底部中央排水口排出,而剩余颗粒物随着大流量水体通过位于养殖池侧壁的高排水口排出,且在这种出流条件下,养殖池内水体呈现出良好的混合特性[30]。通过调节Cornell型双通道圆形养殖池中的水循环率,底部中心排水管的表面负荷率,进水口的大小、数量和角度,可实现有效的水体速度、相对均匀的水体混合和快速的固体冲洗速度[40]。可见,合理利用排水结构,根据需要设置排水口的数量、位置,可以实现固体颗粒物等污染物的迅速排出,优化养殖环境,是实现养殖池内良好流态的较好方法。
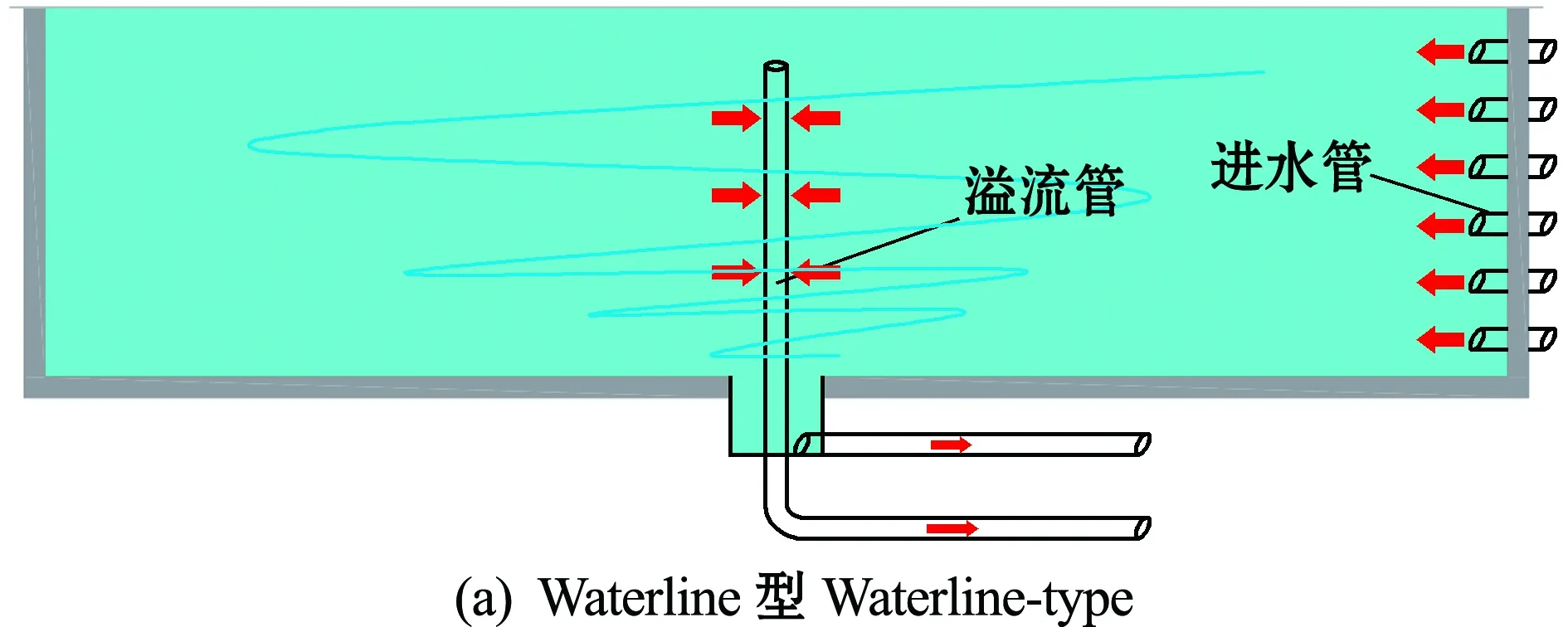
图1 双通道圆形养殖池侧视图[18]
2.4 养殖池其他参数对流态的影响
养殖池内的流速及混合程度不仅取决于流量、进水方式、排水方式、入射角度、喷嘴直径、底部分流比及进水管间的距离,还取决于进水速度、循环量等重要参数。
养殖池内水流的速度受到入口冲击力的控制,本质上系统入水能量的大小与系统流场性能直接相关,通过调整入口冲击力可优化池内速度和流速分布[41]。而水体循环次数的增加,有助于增加养殖池内的平均速度和速度分布均匀性[35]。计算流体力学(CFD)是一种有效的系统水动力学研究手段,通过计算可以获得更丰富的流场信息,改进和优化系统设计。研究表明,方形圆弧角养殖池相对弧宽比(R/B,R为圆弧角半径,B为养殖池短边边长)和进径比(C/B,直壁单管,C为射流管中心距养殖池壁的水平距离)(图2)的优化有利于改善养殖池内的水动力性能,提高养殖池内平均流速及流场均匀性[42-43]。此外,底面坡度、水流回转速度对方形圆切角养殖池的水动力性能及净水性能存在一定影响[44]。
![]()
图2 方形圆弧角养殖池相对弧宽比和进径比参数示意图[42-43]
3 循环水养殖系统水动力对污染物集排污的影响
3.1 固体颗粒物集排污性能
循环水养殖系统中固体颗粒如残饵、粪便等在水中容易分解矿化,产生氨氮、亚硝酸盐等污染物,对养殖水体污染较为严重,直接威胁到鱼类及其他养殖动物的健康和福利。养殖池内的水动力条件是系统固体颗粒物集排污性能的动力来源,对固体颗粒物集排污性能起到直接影响,因而研究养殖池内的水动力对控制排污、稳定水质有重要意义。
1)沉降分离促进排污。养殖池内主要借助水流旋转产生的离心力或二次流产生的向心力和悬浮颗粒物自身重力来沉降清除水体中粪便、残饵等可沉降悬浮颗粒物[45]。养殖池内的流场和运动特性(如养殖池内的速度场)对固体颗粒沉降产生重要影响。有学者研究了两种入流结构(水平和垂直入流)对养殖池内颗粒物沉降效率的影响,与水平入流相比,垂直入流引起的流场显著提高了沉降效率,而沉降效率的相对提高与入口悬浮液浓度成反比[46]。
2)养殖池参数设置促进排污。增加养殖池底流分流比、底部排水量、水循环率、平均速度均能促进排污,同样合适的径深比、入射角度、射流速度、进水方式、抽吸模式也有利于固体颗粒物的汇聚与排出。其中,增加底部中心排水量可以改善圆形养殖池内水流速度的均匀性。同样,较高的底流分流比增加了底部中心排水口附近的水流速度,可实现养殖池池底固体废弃物快速有效地去除,中心排水口处较高的流速可以有效避免固体颗粒物的沉积和滞留[40]。为了在大型圆形养殖池中彻底清除固体颗粒物,保持水循环次数在0.6~2.0 次/h甚至更高是有效的[47]。针对不同循环水量对养殖水质影响的试验表明,提高循环水量能有效地改善养殖池水质[48]。同时,有学者定义了养殖池内的阻力系数(Ct),通过调整水的交换率和射流速度计算Ct值,可以更直观地获得养殖池中所需的平均速度,并用于排污研究[49]。
3)优化池型结构促进排污。池型结构也对排污有着重要的影响。相比较于矩形养殖池,圆形养殖池的切向进水模式冲力大、能量消耗低,拥有较高的切向速度,使溶解氧和代谢废物等分布均匀,能实现水体充分混合,并有利于固体颗粒物的快速清除,保持养殖池的自清洁能力。矩形圆弧角养殖池和八角形养殖池综合了圆形、矩形养殖池的特点,不仅可以维持更高的空间利用率,而且可以利用养殖池内产生的二次流快速地汇聚固体颗粒等污染物并排出[50]。除此之外,锥形养殖池型的设计可促进固体颗粒的运动和水体间更好的混合,能有效提高养殖池系统的自清洁能力[51]。
综上,养殖池的排污与流场性能尤其是池底的流场性能直接相关,养殖池底部特有的排污结构及养殖池壁与水流的相互作用,会造成一定的动能损失。因此,研究养殖池结构对水动力特性的影响,可以明确水动力特性对固体颗粒物的影响机制。
3.2 可溶性及悬浮污染物的输移扩散
随着水产养殖业的不断发展,循环水养殖系统水体中可溶性及悬浮污染物的有效去除已成为人们关注的热点。污染物的输移扩散主要分为水体内污染物和大气中污染物两部分。水体内污染物主要指残饵、粪便等分解形成的悬浮污染物,以及分解矿化过程产生氨氮、亚硝酸盐等可溶性污染物。已有研究多集中于养殖池内可溶性及悬浮污染物的去除性能方面,应用生物滤池等水处理技术可降低污染物的浓度,而忽略了水流对可溶性及悬浮污染物累积与扩散的影响,对于污染物随水流的输移扩散规律研究较少。
目前,悬浮颗粒的去除方法主要有沉降分离、筛网分离、泡沫分离、介质过滤和臭氧氧化等[45]。养殖池内水流作用对悬浮颗粒等悬浮污染物的扩散规律研究几乎未涉及,同时可溶性污染物随水流扩散研究也鲜有报道。循环量是影响污染物去除、调节污染物浓度的重要参数之一。随着循环量的增加,养殖系统水体内氨氮、亚硝酸盐的去除效率增加,浓度也相应降低[52]。有关水体内可溶性及悬浮污染物输移扩散的研究多集中在近海岸,如连云港近岸海域污染物的浓度增量与污染物的排放量成正比,与水体流速、流量成反比[53]。简单波流场对近岸点源和连续源情况下污染物的输移扩散特征的影响试验表明,瞬时点源扩散呈圆环分布,浓度值在中心最大并向外部递减,连续源扩散浓度则随空间呈椭圆分布,距离点源越远相对浓度越小,并逐渐趋向于稳定值[54]。此外,沿岸方向对流作用是水体表面污染物扩散的主要动力因素,破波带内波流同时存在,由于受到沿岸流的影响,破波带内污染物主要沿海岸方向扩散[55]。
近海可溶性及悬浮污染物的输移扩散较大程度上取决于流场结构,同样,养殖池内流场结构对污染物扩散也存在较大影响。目前,有关循环水养殖池内可溶性及悬浮污染物的输移扩散研究几乎未见报道,因此,流场结构对养殖池内的污染物输移扩散机制研究可借鉴近海岸可溶性及悬浮污染物研究的经验,通过流场结构与水处理技术的有效结合,才能最大程度地去除养殖池内可溶性及悬浮污染物。因此,开展污染物输移扩散机理的研究,对污染物的去除不仅具有重要的理论意义,而且具有较大的应用价值。
4 增氧设备对水动力的影响
增氧设备在循环水养殖系统中起着至关重要的作用,循环水养殖系统通过机械设备向水中增加氧气以改善养殖环境、提高养殖密度。目前,增氧设备主要有微孔爆气技术、曝气插流装置、水车式增氧机等。现阶段,利用增氧设备在向水体增氧的同时,改善养殖池内流速分布及增强集污性能是一个新的研究方向。在养殖池底部安装曝气设备既能影响养殖池内的水流,又能提高增氧效果。
在工厂化养殖中,微孔曝气技术是一种应用较为广泛的高效曝气技术,其利用微孔曝气管将气体以微小气泡的形式分散到水体中,在气泡上升过程中水体随之流动,上层溶解氧浓度较高的水体被带入下层,同时水流加速了微孔管周围高溶解氧水体的扩散,提高了水体的溶解氧含量,同时增加了水体的均匀性,有利于养殖生物的生长和福利[56]。曝气插流装置(APFD)则较好地利用了曝气技术,使水塘沟道系统循环运转起来,在提高溶解氧的同时促进了系统的流通[57]。水车式增氧机也是养殖池使用较广泛的增氧设备,其利用叶轮击打水体,在提升下层水体到大气中增加溶解氧的同时,推动养殖池内水的流动形成环流,有利于实现残饵、粪便等固体颗粒物的汇聚与排出[58]。研究表明,水车式增氧机在不同布设角度、布设距离比,以及不同驱动流速对方形圆切角养殖池内污物汇集与流场特性均有一定影响;在一定的布设比工况下,布设角度为45°时,集污效果最佳[59]。另有学者研究表明,四角形扩散器具有最佳的污物收集效果及良好的曝气性能,是循环水养殖系统增氧设备的最佳选择[60]。
通过增氧设备代替养殖池内传统的射流管进行水力驱动及集排污是一种良好的优化方法,也是重点研究方向之一,与射流管相似,增氧设备的位置及角度等均会使养殖池内的水力特性发生改变,因此,选择合适的增氧设备布设方式,既能产生良好的水力特性,又能增加养殖池内的溶解氧。
5 水动力与鱼类的相互影响
5.1 水动力条件对鱼类的影响
良好的水动力条件有利于鱼类的生长和福利,而不佳的水动力条件如超出鱼类所适应的紊流、剪切力等会增加鱼类的能量消耗,甚至对鱼类造成损伤。鱼类的规格大小、品质、健康状态与养殖池的水动力条件密不可分,构建适宜的流场条件有利于鱼类的健康、高效生长。鱼类通常规避溶解氧含量低、流速过快及代谢废物过高的区域。因此,了解水动力对鱼类的影响机制至关重要,对鱼类养殖及经济收益均有深远意义。水动力条件对鱼类影响主要表现在鱼类游泳行为、运动状态、生活习性、生长、摄食及空间分布等方面。
5.1.1 流场对鱼类分布的影响 鱼类在水体中的分布是一个动态过程,取决于一系列复杂的生物和非生物环境因素,大多数因素都影响鱼类分布。其中,非生物因素主要是水流对鱼类分布的影响[61]。目前,关于循环水养殖生产池内鱼类分布规律的研究较少,部分研究仅在实验室条件下进行。
流场是循环水系统营造时考虑的重要水动力条件,与养殖动物福利和效益密切相关,鱼类分布反映了鱼类对养殖环境的喜好与适应性。鱼类在养殖池内的分布情况,直接反映了系统构建水体的有效利用情况,间接反映了池内的水流速度、流场的均匀性,以及污染物与营养物质如溶解氧等的累积分布状态。众所周知,圆形养殖池内流场均匀性较好,池中鱼类分布较均匀,养殖水体空间利用率更高、更充分。养殖池内的水流速度显著影响鱼类的分布并具有正相关关系,应用鱼类分布均匀性系数(FCU)可以更好地评估养殖池中鱼类分布的均匀性[62]。自然界淡水水体大致可以分为两种类型,一种是低换水率的静水水体(湖泊、水库和池塘),另一种是高换水率的动水水体(河流和溪流)。影响鱼类分布的因素多种多样,在静水中水流的影响较小,相反在动水中水流为主要影响因素[61]。鱼的种类不同,对流场条件的偏好也有差异。鱼类的分布主要取决于其主动选择最佳的流场区域。一些栖息在河沟中的鱼类,尤其是梭鲈,喜好利用高流速的地貌特征在河底附近游动,而绝大多数非洄游鱼类(鲤科鱼类等)更喜好异质的栖息地、河岸带、岛屿、沙嘴和河湾后面的平静水域部分。此外,水流速度也是影响鱼类迁徙的指标之一[63]。
5.1.2 流场对鱼类行为的影响 鱼类有流场偏好,在一定流速范围内,随着流速的增大趋流性鱼类的趋流率、摆尾频率、耗氧率均显著上升,且不同鱼类所适应的流速范围不同[64-66]。若养殖池内的水流速度低于最佳值时,由于较高的自发性活动(如攻击性)而损失大量能量,在高于最佳速度时,鱼类的活动变得不可持续、有压力,造成缺氧,最终导致疲劳[67]。
张倩[68]研究表明,同一温度条件下,流速对团头鲂幼鱼的游速、游距、转角及游泳轨迹均有显著影响,团头鲂幼鱼游速、游距及转角随流速的增加而增大,游泳轨迹愈加复杂。Polverino等[69]研究显示,食蚊鱼的活动性及行为会受到养殖池大小的影响,食蚊鱼的平均活动性会随着养殖池的增大而增加,不同规格的养殖池会造成不同大小鱼类间的行为差异。曹平[70]在针对均匀流场和竖缝式鱼道特征流场对草鱼幼鱼的游泳能力及行为影响试验中,发现绝大多数试验鱼会避开流速和紊动能较高的区域,并且发现草鱼幼鱼上溯所喜好的池室流速为0.05~0.60 m/s,其中,所受到的水流阻力是影响其通过的重要因素,阻力越大,成功率越低。这表明,鱼类通常会躲避混乱、波动大的水流,而具有可预测性的水流会吸引鱼类。此外,鱼类能利用水流经过物理结构或者其他生物推进作用产生的涡旋来提高本身的游泳能力,降低能量消耗,并且涡旋提供了一个能量丰富的环境[71]。
5.1.3 流场对鱼类生长、摄食的影响 适宜流速对鱼类的生长、摄食产生积极影响,并且存在一个阈值。当流速小于阈值0.6 m/s时,流速对鲫的生长在短期内起到促进作用;动能梯度能很好地反映鲫的能量消耗情况,随着动能梯度的增大鲫所耗费的能量增加,其体质量增长率随之减小,鲫生长所需动能梯度阈值为0.009 J/(kg·m)[72]。
流速通过调控水体中氨氮等污染物的浓度影响鱼类的食欲进而反馈到生长。较高的氨氮含量会极显著地影响鱼类的摄食及特定生长率[73]。对循环水养殖大菱鲆的研究发现,当流速增加到一定范围时,氨氮等污染物的浓度最低,大菱鲆的摄食量和生长速度最高[74]。此外,循环量也是影响鱼类生长的重要因素之一。随着水体日循环次数的增加,水体中污染物浓度降低,从而减小水中有害物质对大菱鲆的胁迫作用,其特定生长率随之增加,饵料系数则随之降低[75]。
5.1.4 流场对鱼类健康的影响 及时高效的排污、适宜的紊动条件等对鱼类的健康尤为重要。不恰当的投喂策略引起的残饵过多,若未及时排出,其分解产生氨氮、亚硝酸盐等有害物质会造成水质污染,将严重危害鱼类的健康。
提高流速、增加水循环率能促进排污,有效减小养殖水体中有害物质的积累速度。研究表明,水循环率较低时,水体中氨氮等有害物质增加,虹鳟出现行为异常、畸形甚至死亡的情况[30]。由于液体具有黏滞性,紊流和剪切力存在于大多数水体中,鱼类能利用承受范围内的紊动水流提高游泳能力并获取能量,而当紊动强度过大,超出鱼类承受范围时,会对鱼类造成不同程度地损伤,如黏膜破坏、鳃损伤甚至死亡等。研究表明,紊动强度为0.56~6.64 cm/s时,适合鲫生存,鲫能利用涡旋提高自身游泳能力,紊动强度大于9.09 cm/s时,鲫出现黏膜破坏,眼睛受损,鳃孔出血等现象,甚至出现死亡[76]。
从研究进展来看,水动力对鱼类分布及生长的影响研究虽有一定学术成果,但多数集中在单一流场参数对鱼类的影响方面,且试验研究居多,因缺少实际养殖环境中多种因素的影响,试验研究存在一定的局限性,未来需模拟实际养殖环境中的水动力,在水动力多流场参数对鱼类的影响及水动力与鱼类的相互影响等方面均存在较大的研究空间。相信未来水动力研究领域会有较大拓展,为水产养殖生产提供科学参考。
5.2 鱼类对水动力条件的影响
鱼类亦会对养殖池内的水动力条件造成一定的影响,与纯流场的养殖池系统相比,鱼类加入循环水养殖系统会引起湍流变化、平均流速降低、水循环阻力增强及水体混合程度加快等,而流速分布、溶解氧的分布也发生了改变。
部分学者基于鱼类对养殖池系统的流场影响开展了试验研究,研究主要集中在鱼类的规格、密度对循环水养殖系统流场的影响。Masaló等[77]研究了黑鲈游动对圆形养殖池平均流速及流速剖面的影响,分析了不同工况下有鱼、无鱼及不同规格的鱼对水流的影响。结果表明:由于鱼类游动引起的湍流增加了运动涡流黏度,养殖池中心排水口附近流速降低,养殖池阻力系数增加;在相同的放养密度(14.6 kg/m3)下,小规格鱼(154 g)养殖系统的阻力系数略高于大规格鱼(330 g)。Gorle等[78]研究表明,圆形和八角形养殖池在垂向均呈现出相对均匀的水速度场,有鱼的养殖池内水流速度较无鱼时降低了约25%,鱼的存在对水流流态影响较大;此外,鱼的游泳行为也是养殖池内水体湍流和非线性的主要来源。研究表明,养殖池内鱼的存在,会明显使养殖池内平均流速降低、水体混合增强;随着养殖密度的增加,循环水养殖系统平均流速显著降低,流速分布、溶解氧分布也随之改变[79-80]。与试验观测相比,数值模拟方法提供了丰富的流动细节,更加适合研究鱼类对水动力的影响。Tang等[81]通过计算流体力学模型发现,静水中鱼的圆周运动会使网箱中心产生低压区,并沿网箱中心线产生强烈的垂直流动,且单鱼的规格对整个流场影响较小,在达到一定的鱼群密度时,流场变化显著。而Xu等[82]研究显示,单鱼和鱼群均能引起射流鱼泵内壁面静压峰值,并且这个峰值的振幅由鱼和内部流的速度差决定;单鱼对主流和混合流的流量影响并不显著,然而,当鱼群通过鱼泵时,混合流的流量明显减小,且鱼的运动会对压力分布、轴向速度及径向速度产生影响。
综上,未来需深入研究鱼类对水动力的影响规律,掌握不同规格、密度、种类鱼的加入对养殖池内水动力特性的变化机理,根据不同种类鱼的适应条件差异,进而调整放养策略,以达到放养鱼类健康生长、养殖池空间充分利用的目标。
6 存在问题与展望
6.1 存在问题
循环水养殖池系统中水动力问题不仅影响池内流态、固体颗粒集排污、可溶性及悬浮性污染物扩散等,也与养殖动物的健康和福利息息相关。此外,系统流态也会影响养殖耗能、生产操作的便捷性和养殖经济效益。但循环水养殖池内的水动力问题研究目前仍然存在以下几个方面的问题。
1)中国循环水养殖技术相对落后,水动力学研究未受到足够重视。中国的循环水养殖技术与国外比较相对落后,中国对养殖池结构的设计与优化、净化水质工艺、养殖温度传感器等循环水养殖系统关键技术的科研投入仍较少。国外注重系统整体功能的完备性,而国内则侧重研究新型水循环系统、净水设备及杀菌装置等单个产品的开发推广,单一设备产品往往受到系统整体性能的制约无法发挥应有的效能。循环水养殖系统离不开关键技术的科研投入,也必然离不开对水动力问题的认识,循环水养殖池系统的水动力基础研究长期未受到重视,现有的养殖系统常出现流态不佳、集排污性能不良等困扰生产的问题。养殖系统内细颗粒无法高效去除,当前构建的循环水养殖系统基本可以管理氮废物和气体交换,但不能良好的管理固体废弃物,主要的瓶颈在于,目前可用的技术无法充分从水体中去除系统中产生的细颗粒。而颗粒物的去除又与系统水动力学和颗粒特性密切相关。
2)大型养殖池流态设计复杂,未开展系统性研究。养殖池系统存在边界层、湍流(紊流)效应、二次流等复杂流体力学现象与机理,部分参数的细微变化直接导致流场性能和集排污性能的较大改变。养殖池的设计应基于评估预测三维流态、速度、压力梯度、湍动能及涡旋动力学等基础上,而目前对养殖池流态的系统性研究成果仍较缺乏,循环水养殖池系统的水动力学研究仍处于起步阶段。
3)循环水养殖系统构建时尚未考虑养殖动物在水中的影响。水动力条件是影响鱼类生活的关键因素之一,但目前养殖池内的水动力学研究主要集中在不考虑鱼类的纯流场性能及其对集排污的影响上。鱼类具有能动性,是影响水动力的关键因素,且鱼类与水动力互为影响,因而不考虑鱼类的水动力研究结论并不准确,对于生产应用存在较大的局限性。目前,鱼类与水动力相互影响的研究成果也较少且大多为试验研究,多集中在少数几种鱼类及其对流场参数的影响,即仅研究鱼类分布,以及规格、密度对流场的影响。
6.2 循环水养殖系统中水动力未来重点研究方向
针对循环水养殖池系统中水动力研究领域存在的问题,今后可在以下几方面开展深入研究。
1)加强对养殖池水动力学等的基础研究及与养殖池结构设计、优化等关键技术的集成应用。中国循环水养殖系统的主要研究方向需与国际该领域的热点问题相结合,并根据中国国情与生产需求,遴选出亟须重点研究的方向。循环水养殖系统为水产养殖生产服务,其研究任务不仅限于鱼类,作为系统基础学科的水动力学研究需要重视,并做好与其他技术、设备的集成应用。如针对固体废弃物的有效处理需要多重技术的联合应用,开发合适特性的饲料,调节营养元素的来源(即进料和进料策略),优化养殖池结构设计,改善系统水动力特性及固体颗粒物的去除效率等。
2)利用新型技术加强循环水养殖系统水动力学研究。试验研究是工程水动力研究的常用方法,直接测量数据也获得研究者与生产者的重视,而CFD技术逐步发展成为流体力学研究的重要方式之一。目前,建立合适的计算模型来评估流场和养殖池结构特性成了理论和试验研究的有效补充和验证手段。借助高端计算能力和瞬态湍流模型进行计算研究可以模拟建立养殖池系统并对其流场做出预测与优化,完善系统设计方案。
3)积极开展养殖系统可溶性及悬浮污染物的输移扩散机理研究。通过研究循环水养殖系统流场结构对污染物扩散的影响及其与水处理技术的结合实现可溶性及悬浮污染物的有效去除。
4)基于养殖鱼类开展水动力学研究。“鱼水不分家”,研究鱼类与水动力的相互影响与作用机理将是未来的重点研究方向,无论试验研究还是数值模拟,未来的研究都要引入鱼类的参与,并考虑鱼类与系统流态的互相作用。利用CFD技术简化模拟鱼类在系统中的游泳运动,与鱼类运动和流态相互作用的试验研究形成有效补充。未来需丰富新型研究手段,提升系统水动力学研究针对性和精准性。
5)重视实际养殖环境的多重因素开展鱼类与水动力的互作研究。循环水养殖生产环境中存在生物因素及非生物因素对鱼类的影响,试验研究及数值模拟只局限于鱼类与水动力的相互影响,往往忽略了其他因素对鱼类运动及行为的影响,在鱼类运动与水动力关系构建上存在不足,与实际养殖环境下的水动力特性与鱼类相互影响存在一定的差异。因此,为了提高研究结论的可靠性和适用性,模拟实际养殖环境的多重因素至关重要。
6)加强水动力研究服务于养殖产业。依据养殖实际构建研究系统,研究系统比尺缩放与设计简化要服从研究理论和功能要求,紧密结合生产实际,让优化与提出的设计模型能更好地服务于养殖生产。
7)探索水动力与鱼类行为的交叉结合研究。研究水动力的最终目的是为了实现更高效的养殖生产,而鱼类作为生物具有能动性和对环境的趋利避害性,不同鱼在不同环境胁迫状态下又有着巨大差异,鱼类与水动力的相互影响必然因为研究对象的不同而不断变化。因此,针对特定养殖对象,加强水动力与鱼类行为的交叉结合研究才能更精确地获得流场构建的适宜参数,实现系统有效构建、精准调控、高效生产。
声明:本站属公益性没有商业目的的网站,上列文章仅供个人学习参考。本站所发布文章为原创的均标注作者或来源,未经授权不得转载,许可转载的请注明出处。本站所载文章除原创外均来源于网络,如有未注明出处或标注错误或侵犯了您的合法权益,请及时联系我们!
欢迎关注本站(可搜索)"养鱼E线"微信公众帐号和微信视频号"养鱼一线"以及头条号"水花鱼@渔人刘文俊"!
